Introduction
The WSU AUV team, Palouse Robosub, a team for Robonation’s Robosub Competition, was practically dead when I got to WSU. I remember the club consisted of 3 members, and they had not competed in any capacity since before COVID. COVID almost killed the club, and I am so glad those who were still there didn’t let it die. We started off the first semester by designing mini-submarines which never got built unfortunately. Which is okay because my design was awful as I had no clue what I was doing. I had no guidance and there were no mechanical engineers left, besides a graduate student who would pop in every now and then. But I saw that the club had potential and I knew I had the experience and the determination needed to get the club back. And importantly I was able to convince somebody else to tackle the challenge with me, my now very good friend, but then somewhat stranger, Cole Wilson. So now with Cole as President and Computer Science Lead, myself as Vice President and Mechanical Lead we were able to reorganize the club, and inspire many other key players in getting Robosub back, Natalie Masserenti, Daniel Bereza and many others. We are clawing our way back up, and are determined to compete with our new sub Guppy.
Reorganizing the club
This ranges from reorganizing the entire club room, writing a club constitution, creating training resources, technical schedules, leadership structures, sponsor relations, and more all from scratch. Not to mention all of the hours of technical work I have ahead of me. The good news is, we are already seeing the results, the two images show our club in the spring of 2025 on the left, on the right is fall 2025 after recruiting.

Guppy
Through lots of deliberation, our strategy for the 2027 season will be eventually to run two autonomous subs in tandem. This will be incredibly challenging, but has serious strategical advantages. To get there, for 2026 we are making the first of the sister subs, Guppy. Like mentioned previously, Guppy is an autonomous underwater vehicle (AUV), not only is it autonomous in terms of it’s decision making, but it also has no tether back to shore. All power and data comes directly from within the sub. It is still early in the design process as I write this, so I only have the preliminary CAD model along with many other projects in infancy spread out among our members:
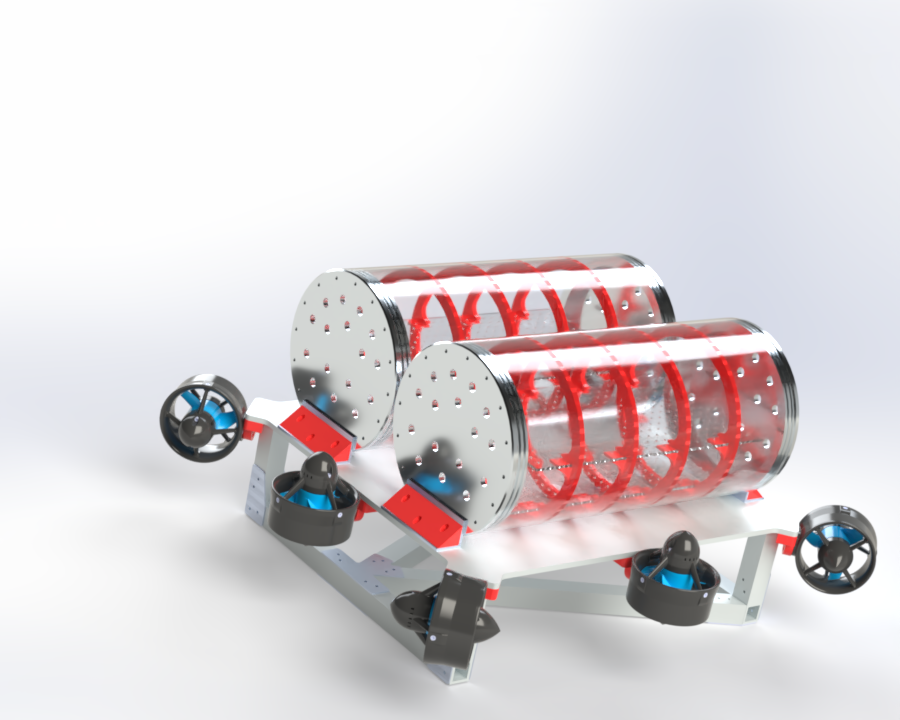
By late October 2025 we will have all of the frame and hull manufactured and assembled. By February 2026 we will have all custom PCBs completed along with the torpedo and arm mechanism. And by August there will be a running AUV, in the pool, in San Diego, competing in Robosub 2026, proudly wearing the beautiful Washington State Cougar logo come hell or high water.