LLV
In my Freshman year I joined the Combat Robotics Club and made a slanted horizontal spinner. We differentiated our bot from the competition in two different ways, our chassis was made entirely from a single PETG print, and our spinner was slanted downward at a slight angle. The mono-print chassis reduced the assembly required and made it stronger, and the slanted weapon was an attempt to attack common wheel hights and attack horizontal under-cutter’s pulleys.

The chassis idea turned out to be a resounding success, however packaging, and the rigidity of the slanted weapon was terrible. We had to cantilever the weapon, which made it incredibly susceptible to breaking. We also were using tiny o-rings for power transformation from the motor, to preserve to motor under weapon contact. This would have been great, except the o-rings were old and had lots of dry rot, so the weapon drive broke every single time it took contact. However because our chassis was so tough, we did win 1/3 of our fights just through outlasting the opponent.
Here is the video of our one win:
As you can see, mistakes were made. This actually wasn’t discouraging at all and I had a ton of fun. If I were do make a V2 of LLV, I would add a shroud over the weapon to support it at both ends, providing better stability or just ditch the angled format all together for a more traditional under-cutter.
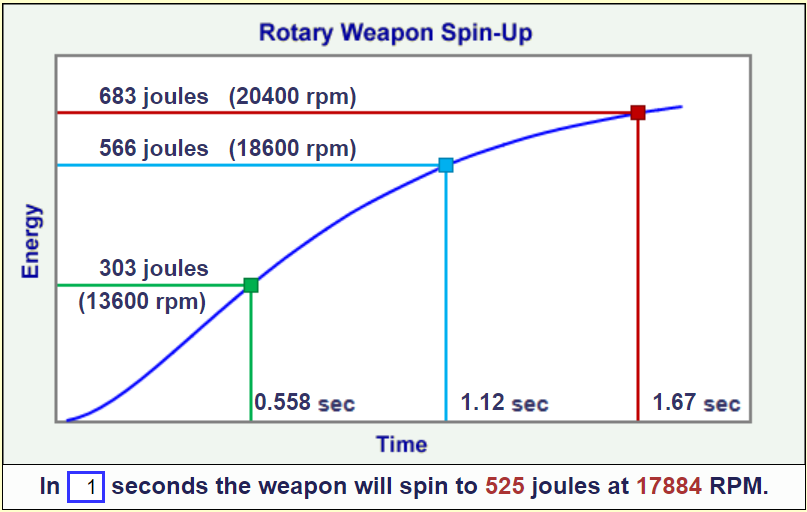
The part I spent the most time on was the weapon disc design. It is made with laser cut 1/8” thick AR 500 and the entire goal was to get as low of a mass/moment ratio as possible, while still having a decent spin up time. Here is the disc and the chart generated via an online calculator:
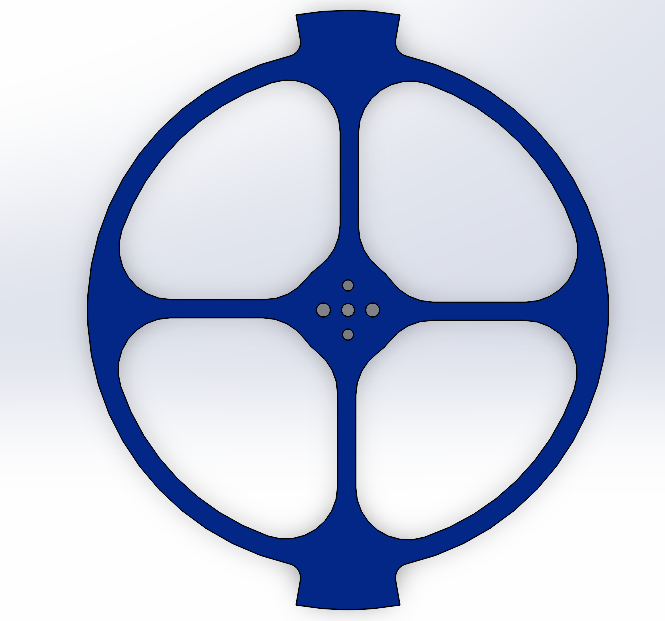
The other time consuming part was the weapon packaging. The motor we wanted barely fit inside the chassis, this means I had to push the weapon mounting up, which meant I had to make a tiny bearing stack, which reuired a custom lathe pulley, which required a custom groove, which required a custom lathe tool. I’d say it was worth it but it exploded anyway.